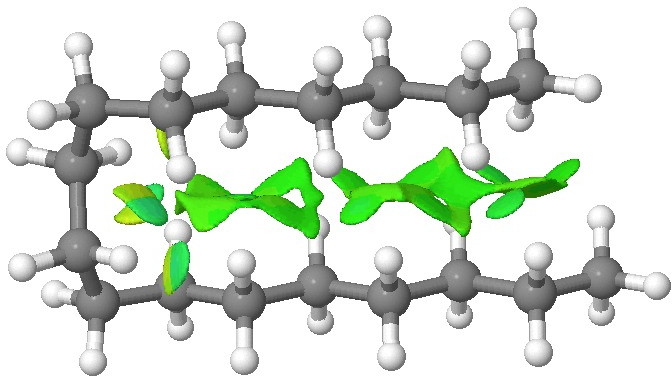
We tend to think of simple hydrocarbons as relatively inert and un-interesting molecules. However, a recent article[cite]10.1002/anie.201202894[/cite], which was in fact highlighted by Steve Bachrach on his blog , asks what “
The Last Globally Stable Extended Alkane
” might be. In other words, at what stage does a straight-chain hydrocarbon fold back upon itself, and no significant population of the linear form remain?
References
ElectrochemistryCondensed Matter PhysicsBiomaterialsElectronic, Optical and Magnetic Materials
Autori Jing Yu, Sathya Chary, Saurabh Das, John Tamelier, Noshir S. Pesika, Kimberly L. Turner, Jacob N. Israelachvili
AbstractMost geckos can rapidly attach and detach from almost any kind of surface. This ability is attributed to the hierarchical structure of their feet (involving toe pads, setal arrays, and spatulae), and how they are moved (articulated) to generate strong adhesion and friction forces on gripping that rapidly relax on releasing. Inspired by the gecko's bioadhesive system, various structured surfaces have been fabricated suitable for robotic applications. In this study, x–y–z asymmetric, micrometer‐sized rectangular flaps composed of polydimethylsiloxane (PDMS) were fabricated using massively parallel micro‐electromechanical systems (MEMS) techniques with the intention of creating directionally responsive, high‐to‐low frictional‐adhesion toe pads exhibiting properties similar to those found in geckos. Using a surface forces apparatus (SFA), the friction and adhesion forces of both vertical (symmetric) and angled/tilted (x–y–z asymmetric) microflaps under various loading, unloading and shearing conditIons were investigated. It was found that the anisotropic structure of tilted microflaps gives very different adhesion and tribological forces when articulated along different x–y–z directions: high friction and adhesion forces when articulated in the y–z plane along the tilt (+y) direction, which is also the direction of motion, and weak friction and adhesion forces when articulated against the tilt (–y) direction. These results demonstrate that asymmetric angled structures, as occur in geckos, are required to enable the gecko to optimize the requirements of high friction and adhesion on gripping, and low frictional‐adhesion on releasing. These properties are intimately coupled to a (also optimum) articulation mechanism. We discuss how both of these features can be simultaneously optimized in the design of robotic systems that can mimic the gecko adhesive system.